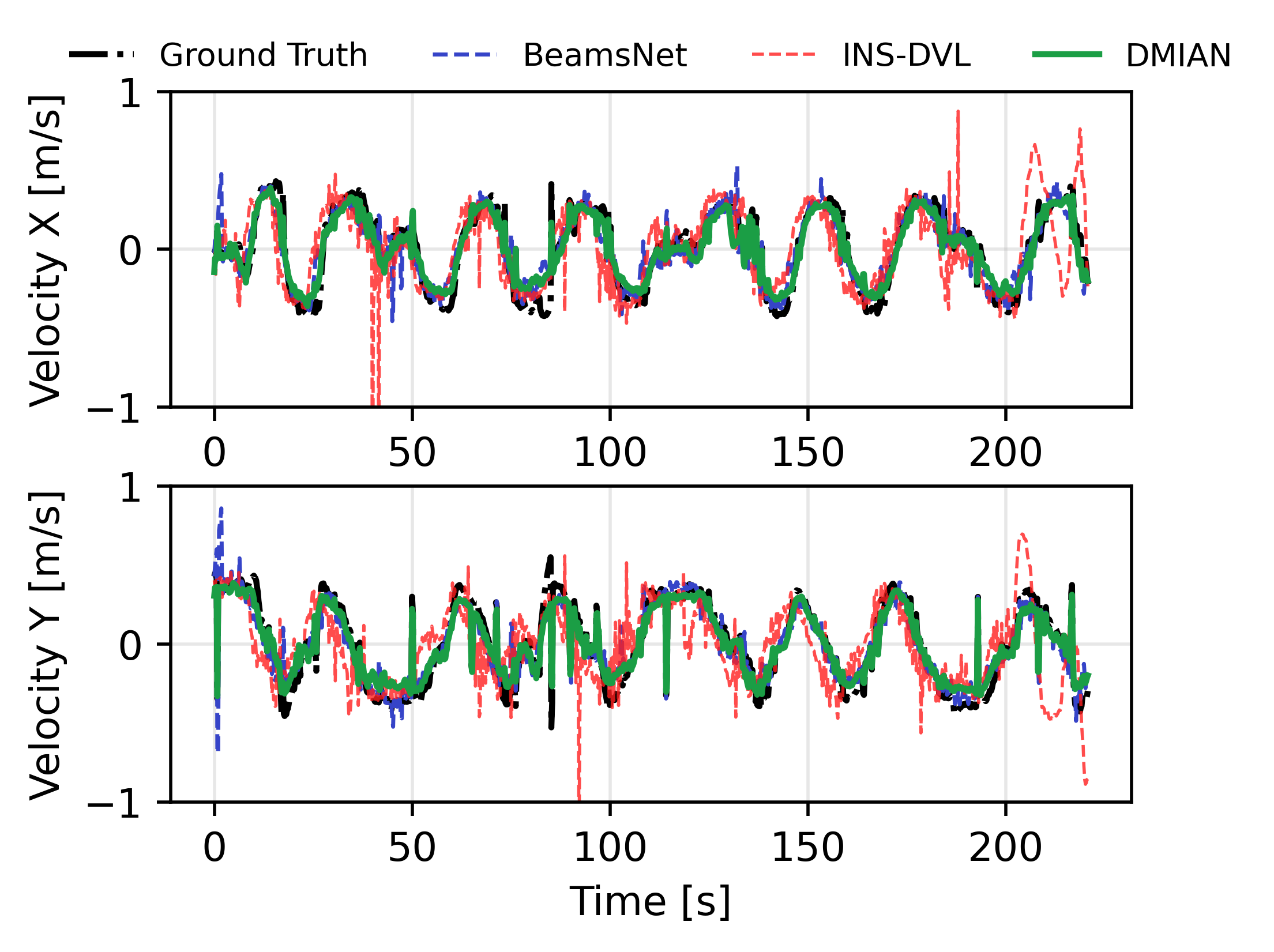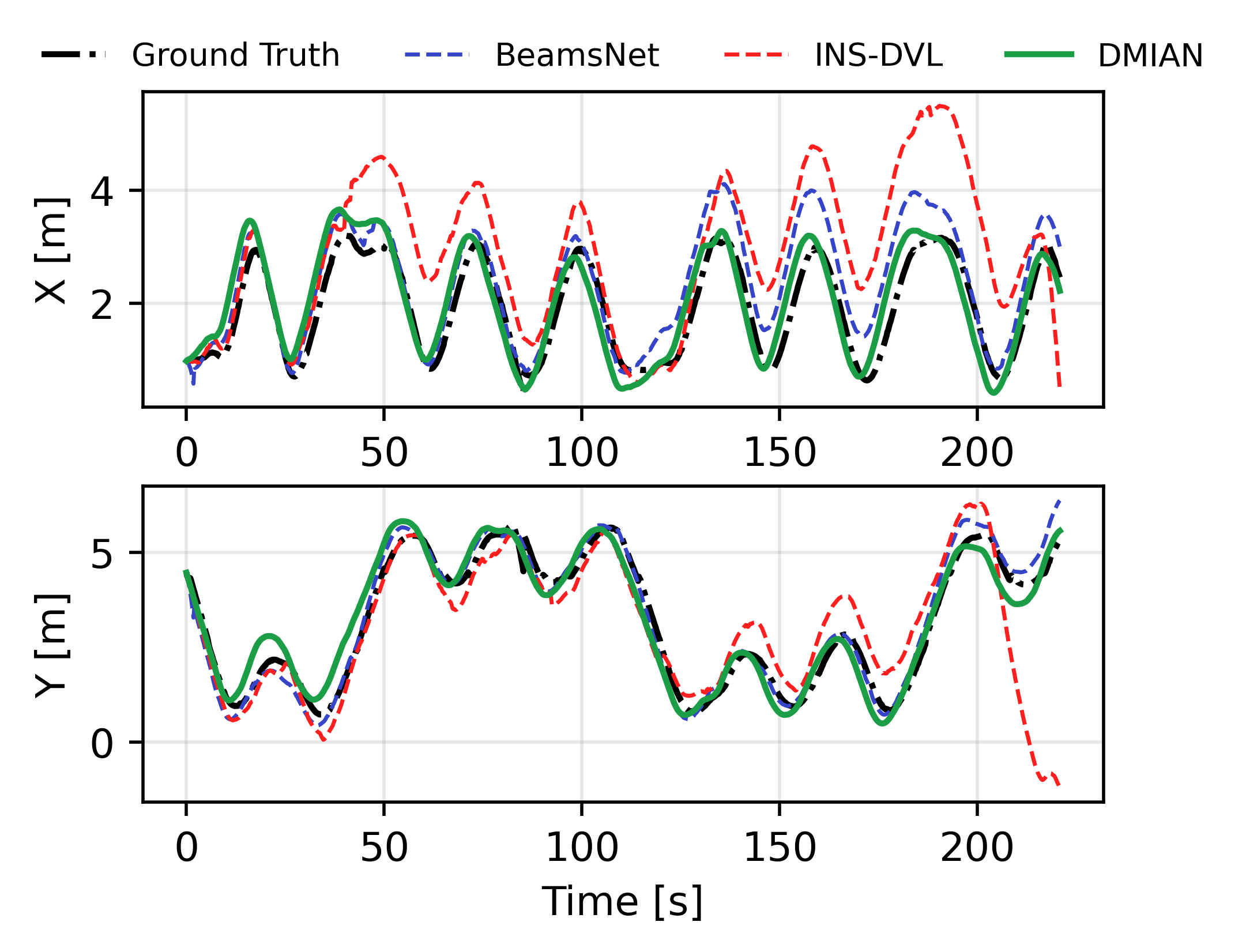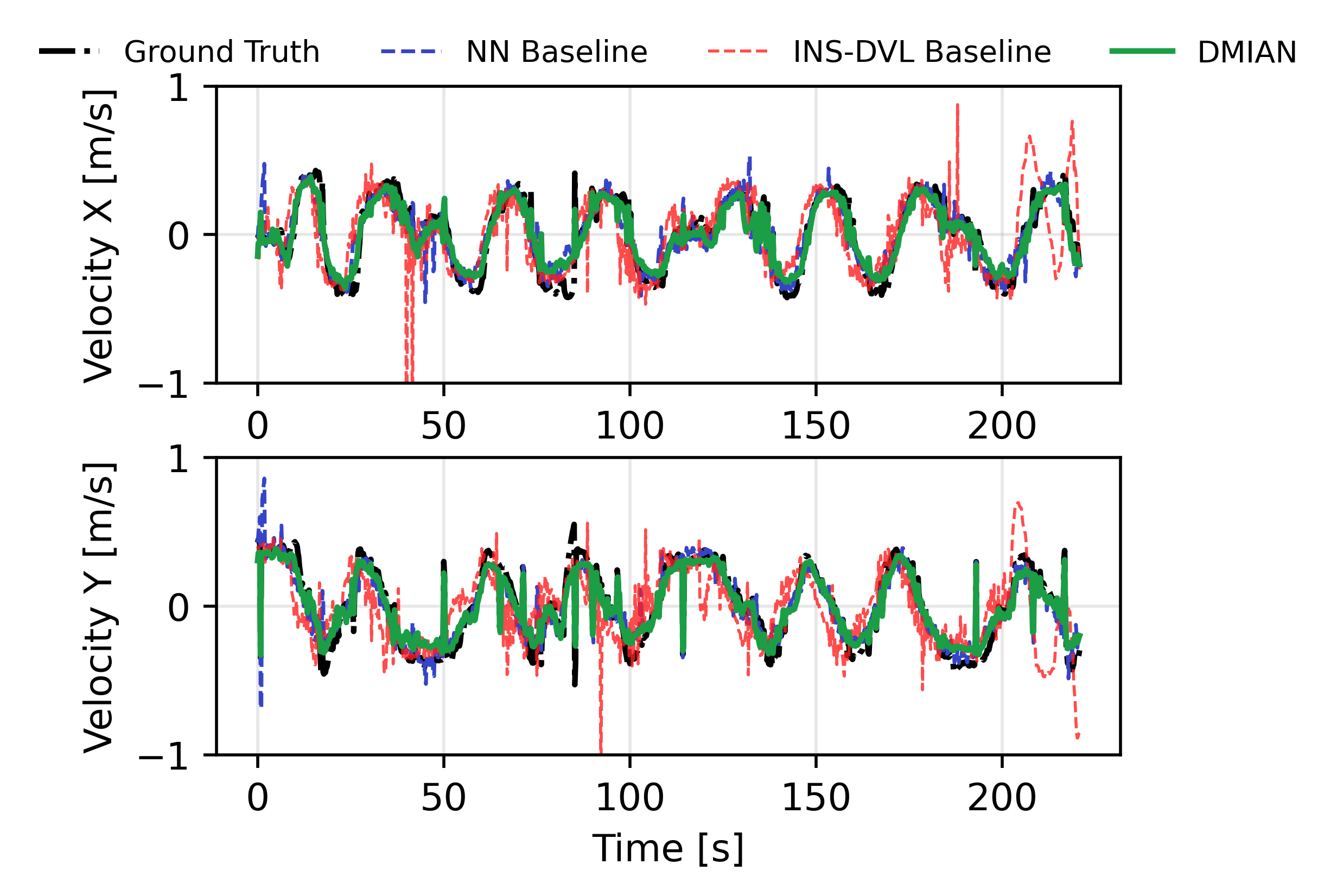
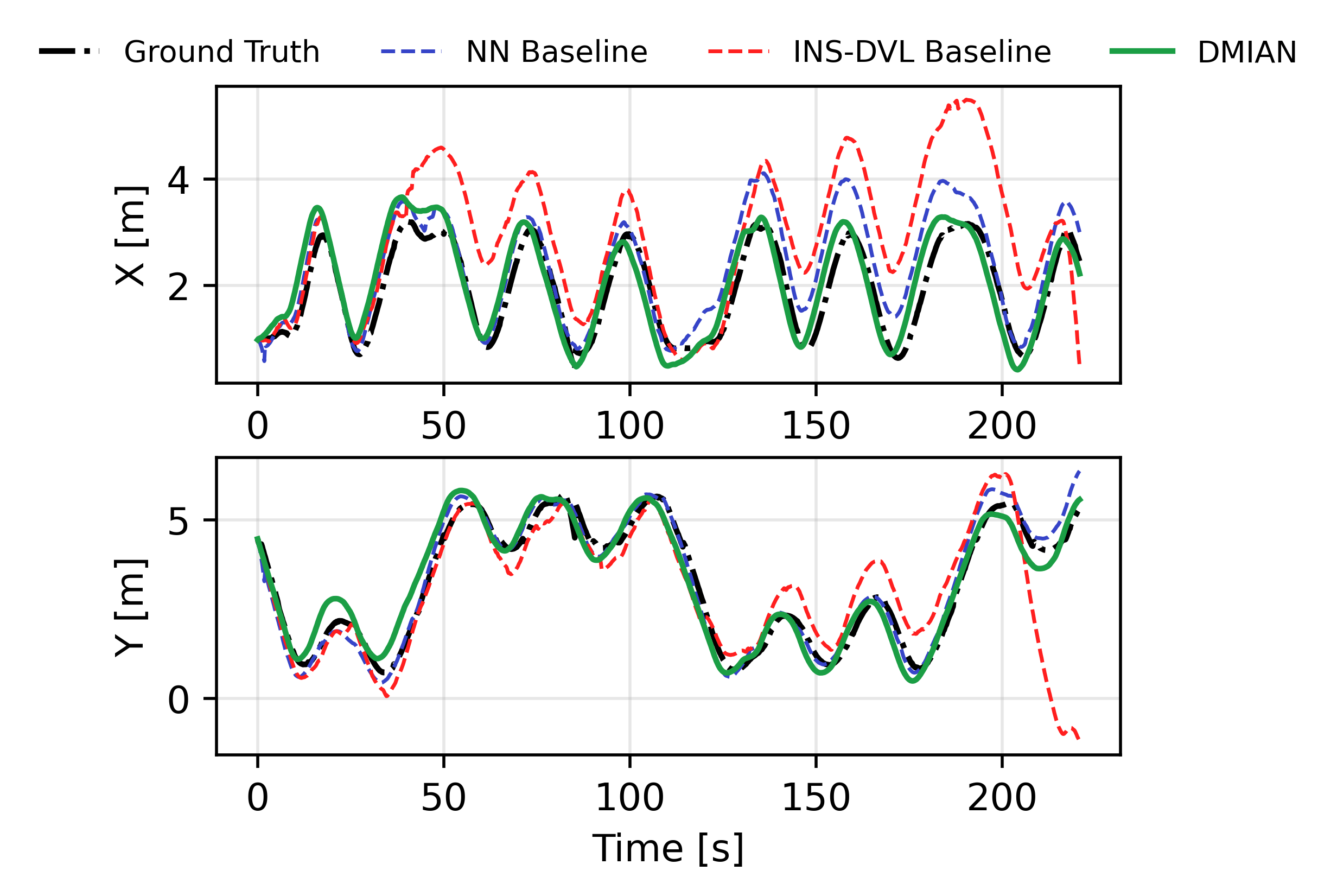
Estimated results from the proposed method. Left: velocity over time. Right: position over time.
4.3 ms
Inference time (CPU)
0.11
Vel. RMSE (m/s)
0.88
R² Score
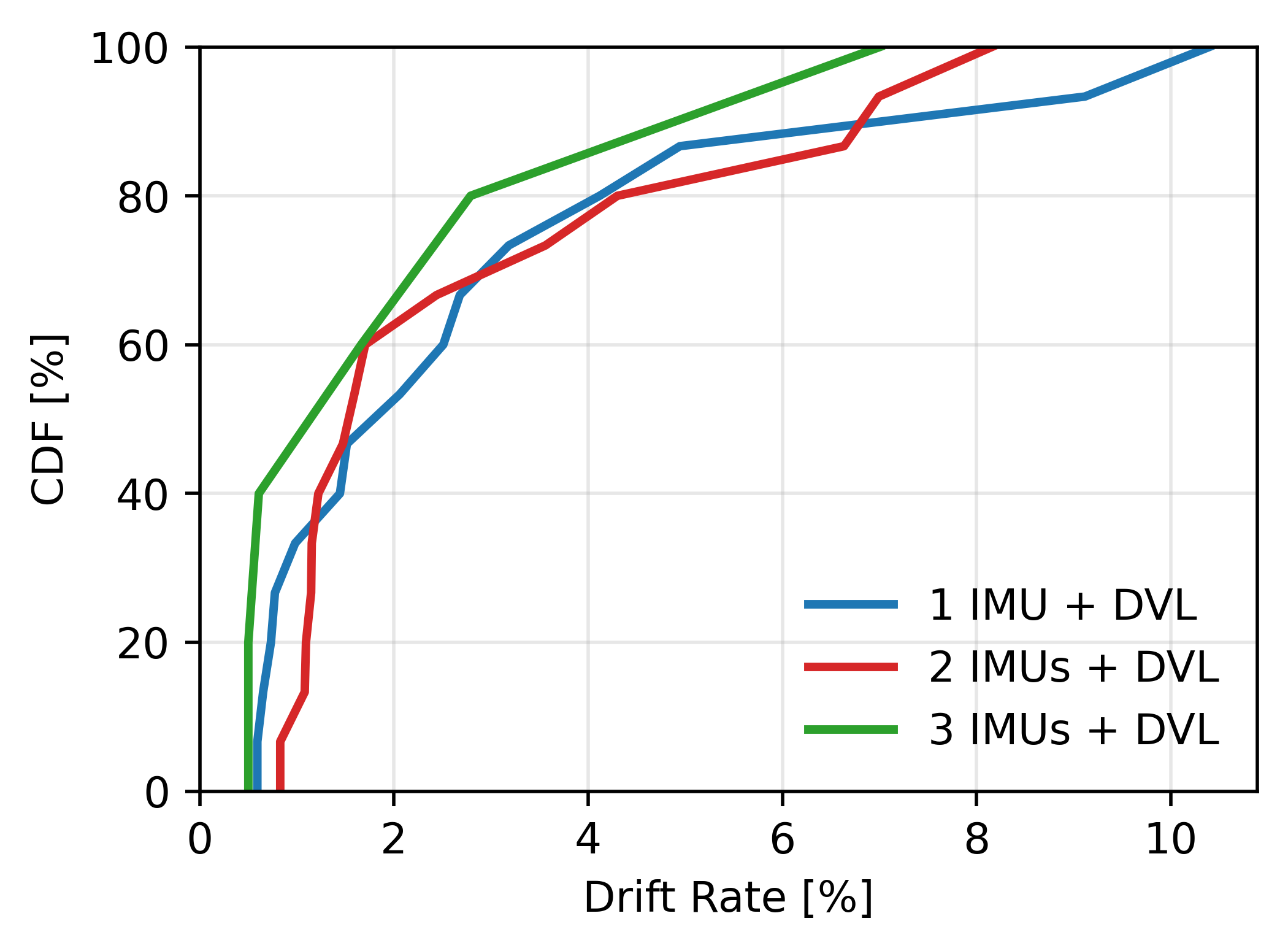
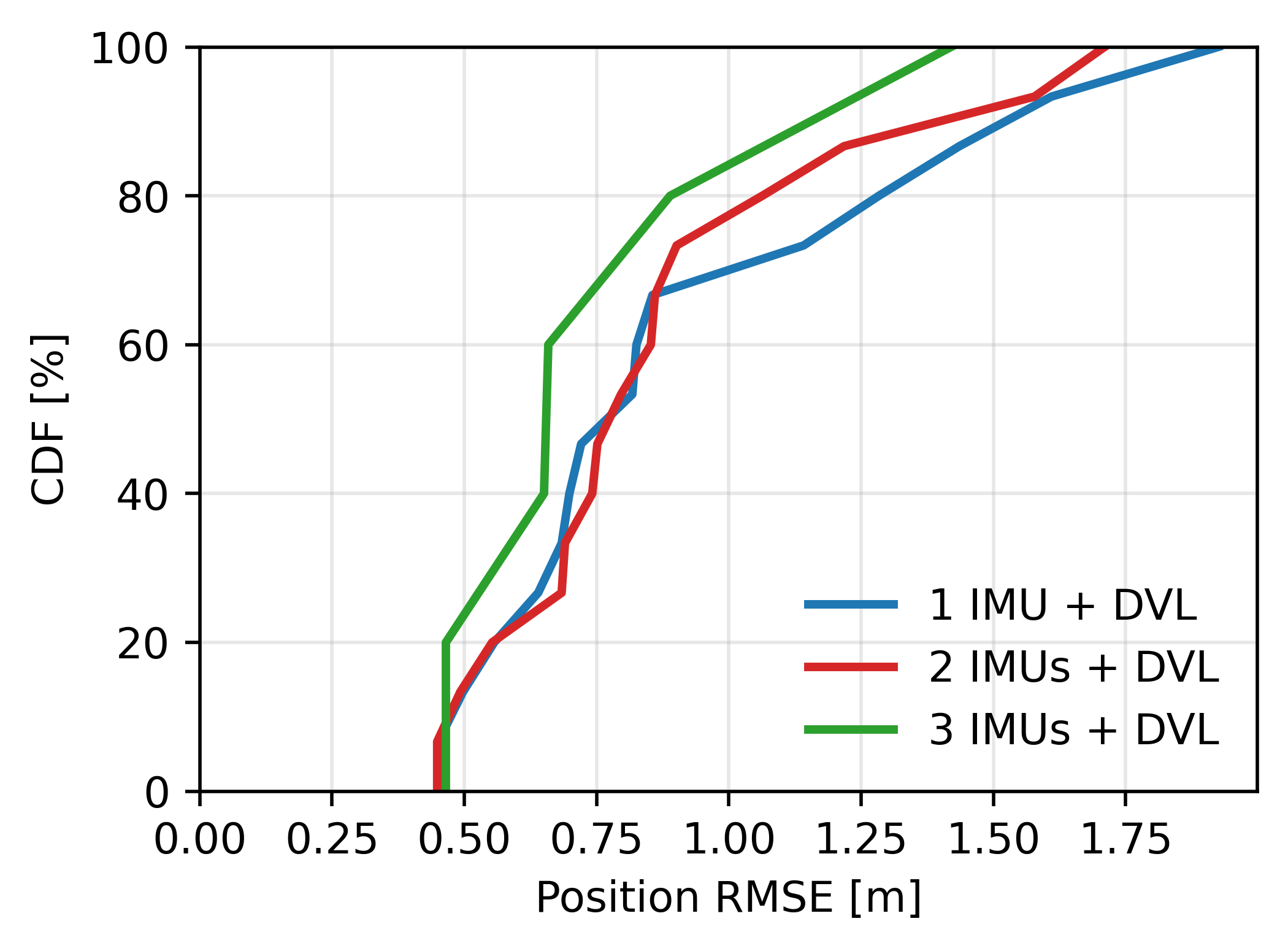
0.804
Pos. RMSE (m)
54.6%
Improvement vs INS-DVL
27.5%
Improvement vs NN baseline